*Equal Contribution, 1Khalifa University Center for Autonomous Robotic Systems (KUCARS), Khalifa University, UAE, 2Department of Electrical, Computer and Biomedical Engineering, Abu Dhabi University, UAE
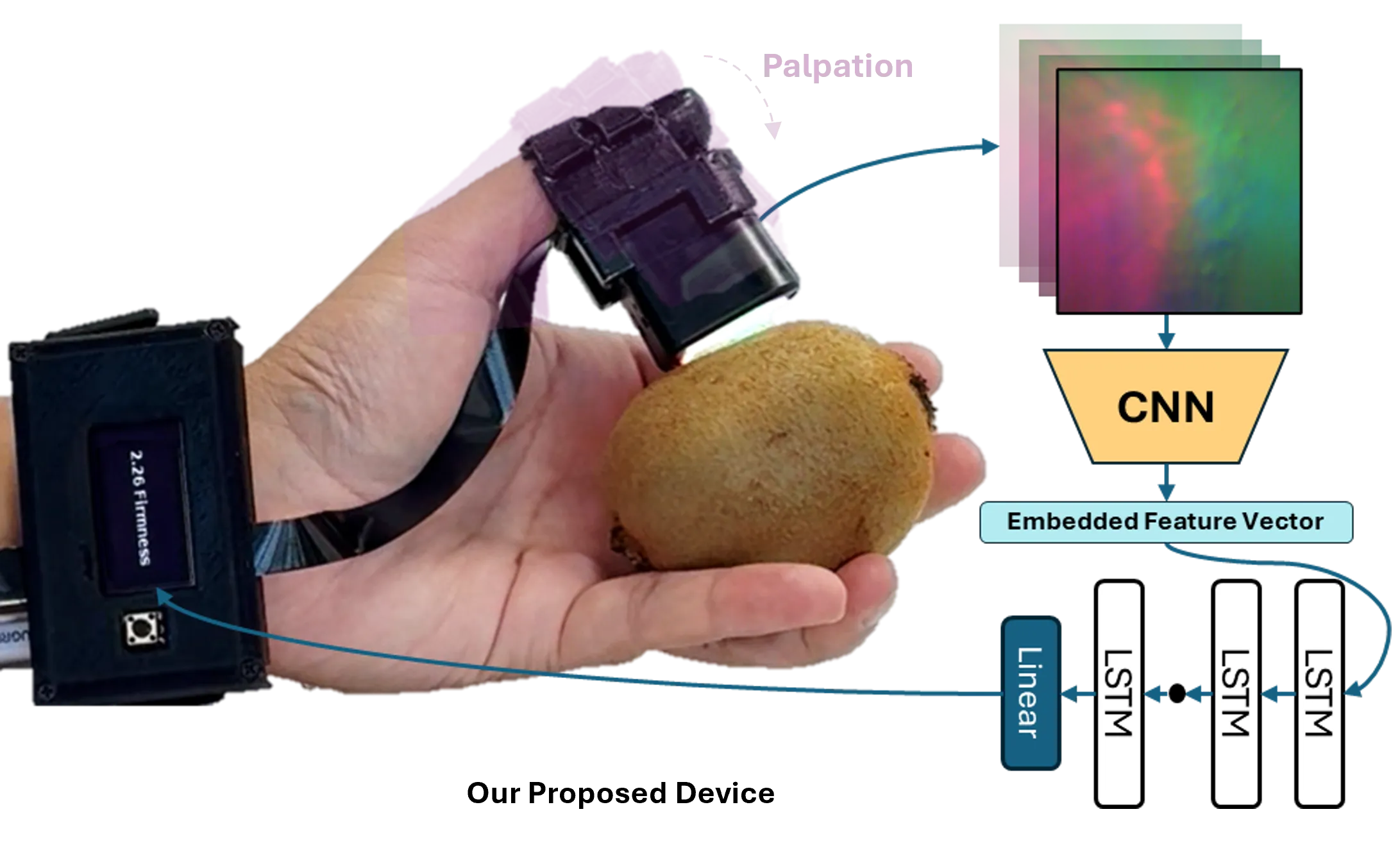
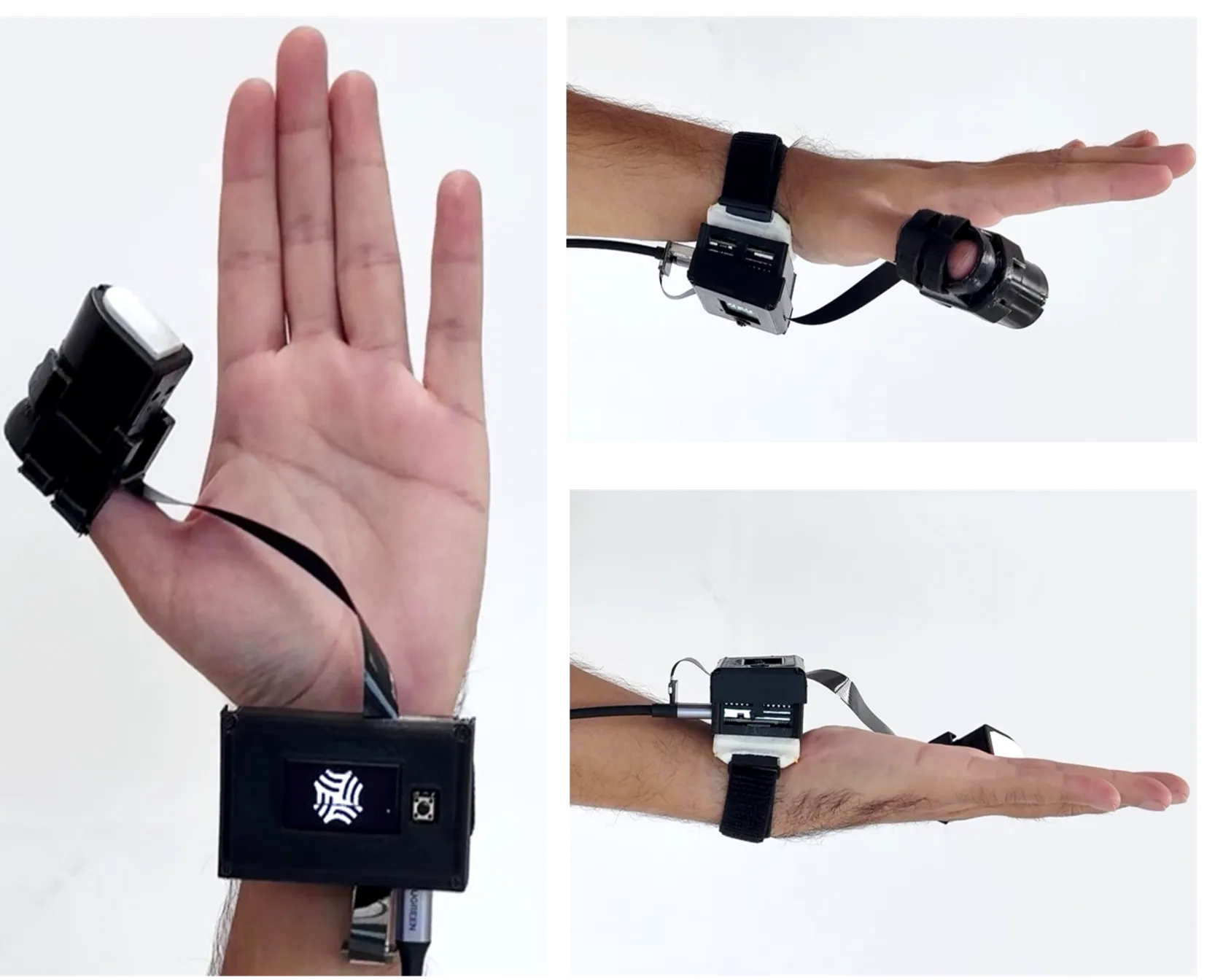
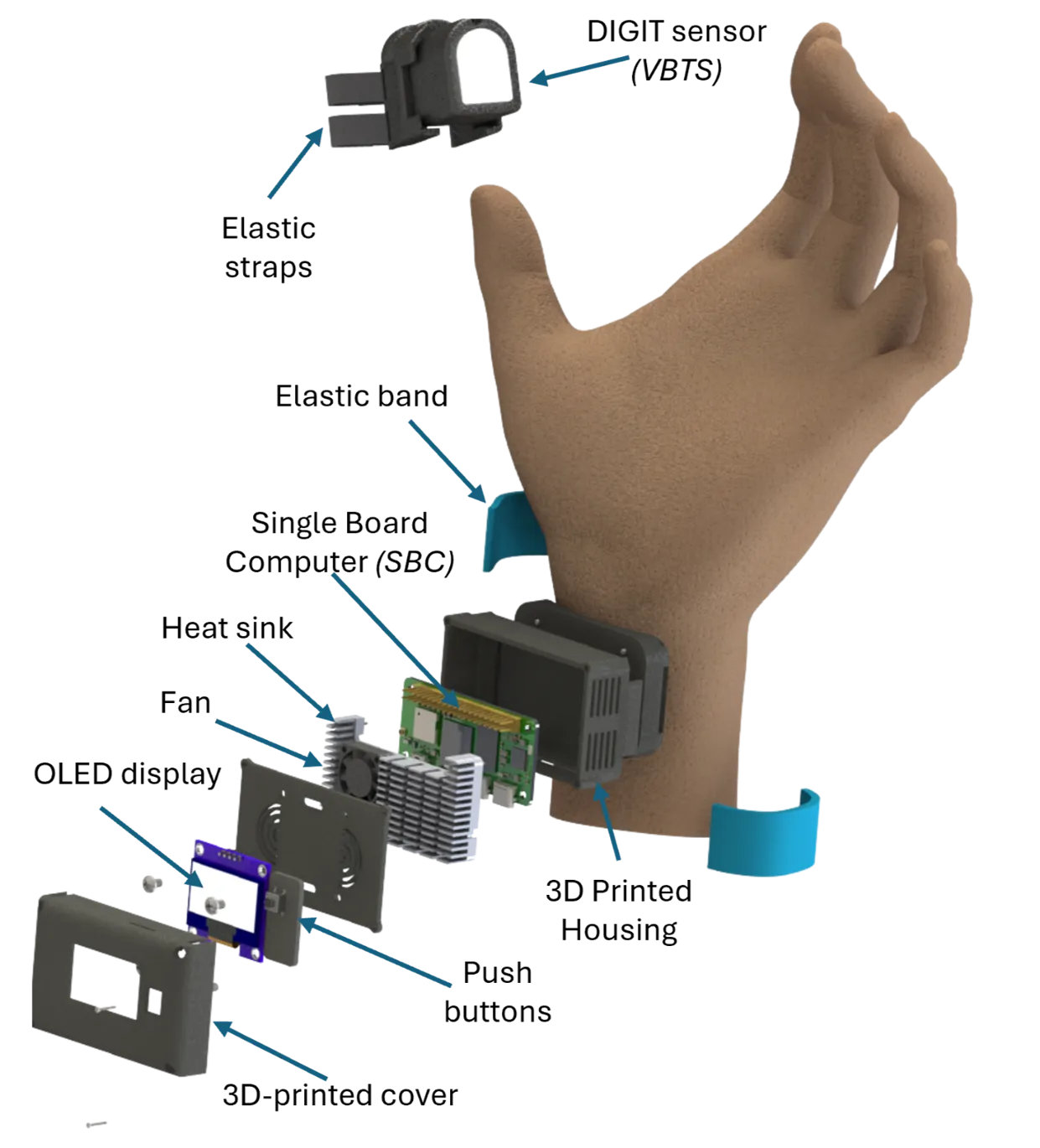
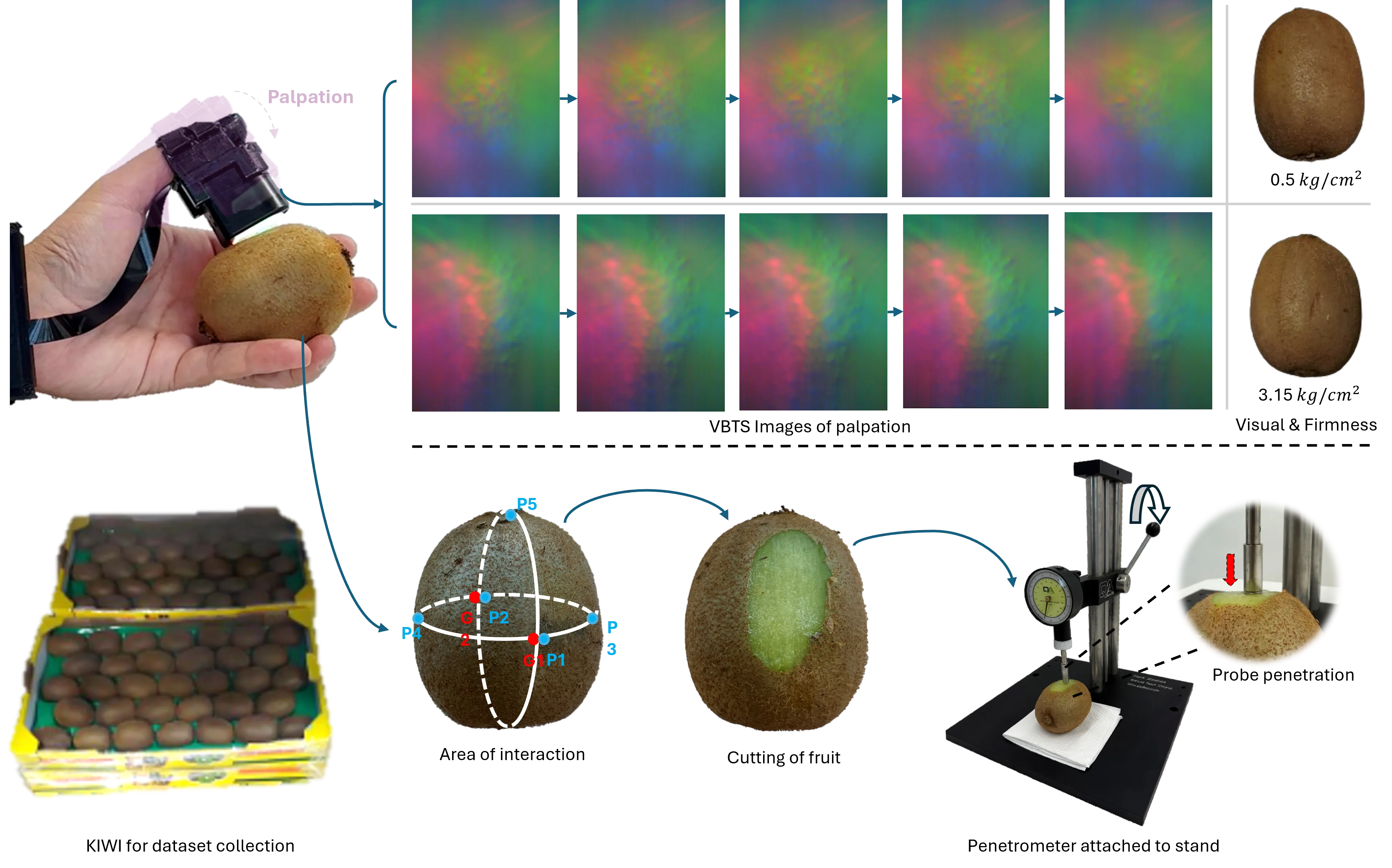
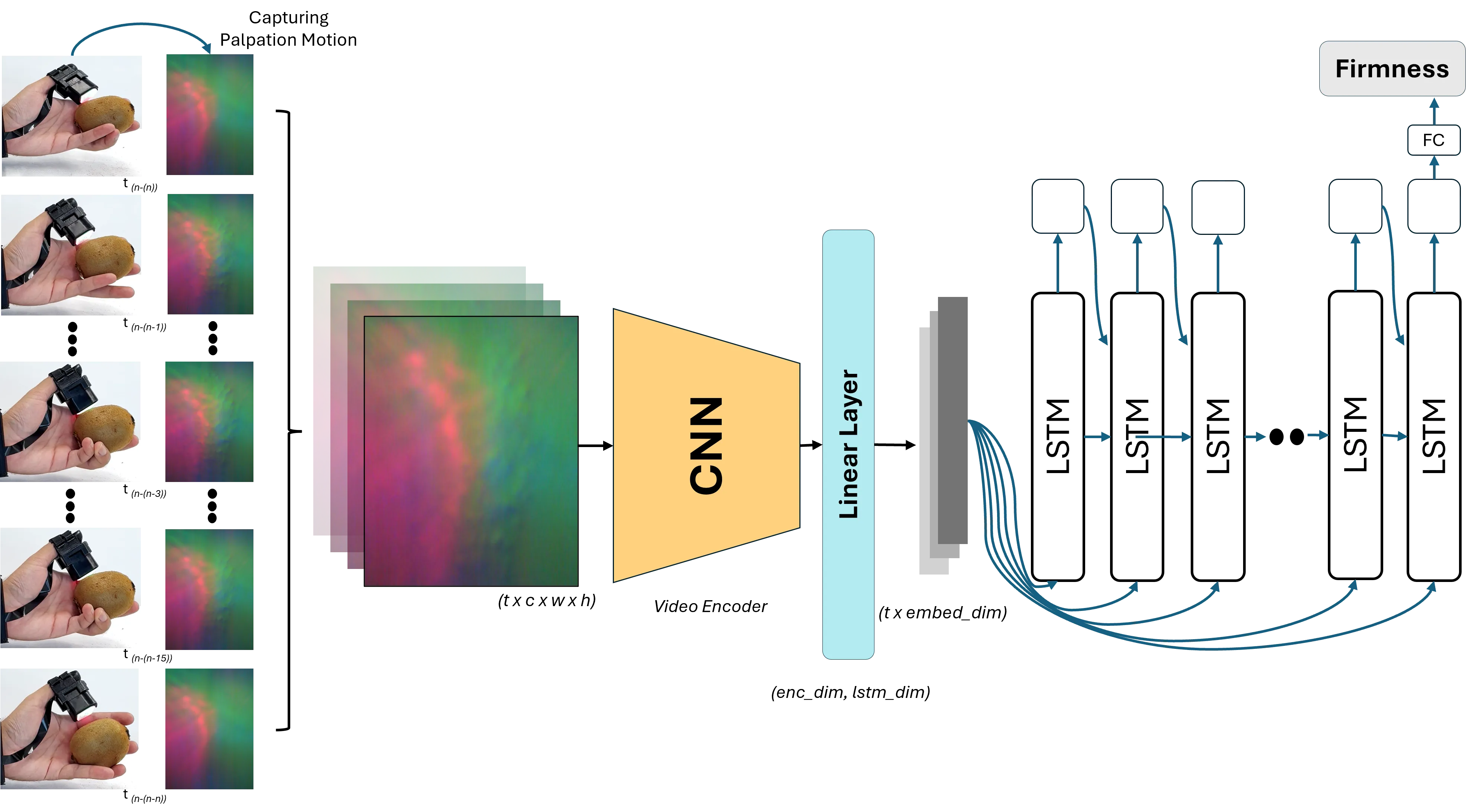
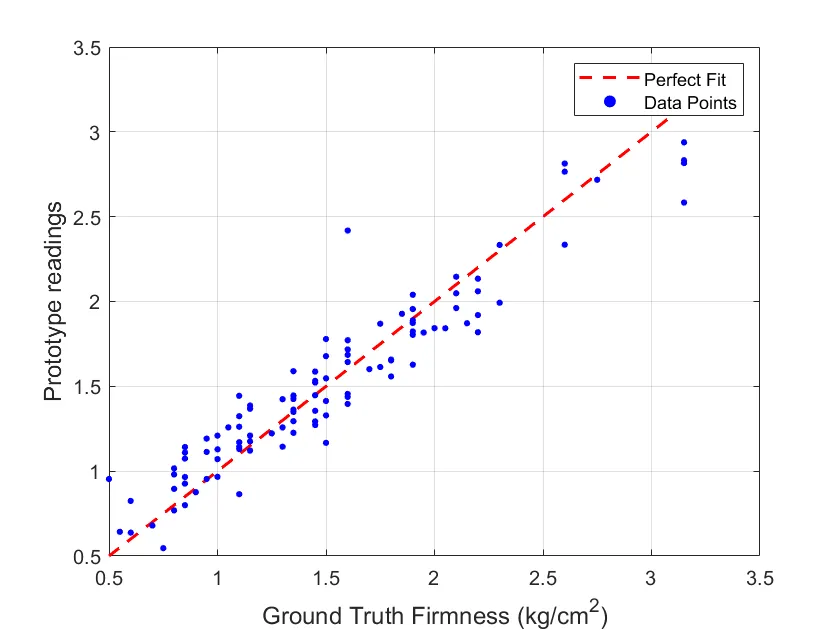
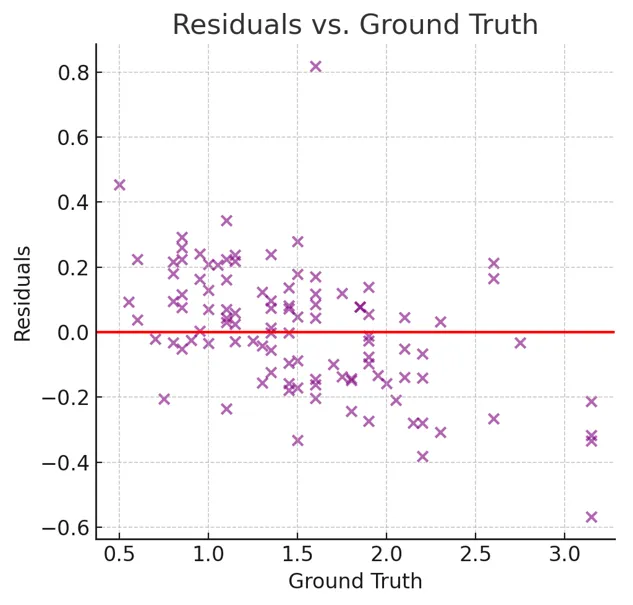
Recent advancements in non-destructive technologies have enabled precise firmness measurement for various fruits, including kiwifruit. However, existing methods remain limited by high costs, environmental sensitivity, and field application impracticality. This work introduces a novel wearable device for estimating non-destructive fruit firmness, combining human tactile interaction with vision-based tactile sensing and edge computing. Worn on the thumb, the device leverages embodied intelligence, merging intuitive human touch with the precision of a vision-based tactile sensor. A single-board computer processes tactile images locally, enabling reliable operation even in remote environments. The device employs our proposed deep learning model for real-time firmness predictions from a single palpation, minimizing repetitive handling and reducing fruit bruising. Its ergonomic, symmetrical design supports comfortable use on either hand, enhancing usability. Compact and portable, the device integrates essential components within a housing measuring 40 mm × 25 mm × 72 mm and weighing only 135 g. Validated through non-destructive ripeness assessments on ‘Hayward’ Kiwifruit, the device demonstrated a strong correlation between tactile images and firmness values when paired with our proposed model, achieving a coefficient of determination (R2) of 0.89. This study created a dedicated dataset on Kiwi firmness to support model development and validation.

This project builds on our prior research in tactile sensing and fruit firmness estimation. For further exploration of our methods and insights, refer to:
We encourage readers to explore these works for deeper technical context and complementary advancements.
This publication is based upon work supported by the Khalifa University of Science and Technology under Award No. RC1-2018-KUCARS. Some elements of this project’s README design were adapted from YCB-Slide. The website was built using Roman Hauksson’s academic project page template.
@article{MOHSAN2025110593,
title = {A wearable thumb device for fruit firmness estimation with vision-based tactile sensing},
journal = {Computers and Electronics in Agriculture},
volume = {237},
pages = {110593},
year = {2025},
issn = {0168-1699},
doi = {https://doi.org/10.1016/j.compag.2025.110593},
url = {https://www.sciencedirect.com/science/article/pii/S0168169925006994},
author = {Mashood M. Mohsan and Basma B. Hasanen and Taimur Hassan and Lakmal Seneviratne and Irfan Hussain}
}